
STM32CubeMX重定向printf输出至串口
STM32CubeMX重定向printf输出至串口第一步,CubeMX配置串口(GPIO配置略)
第二步,包含头文件
1#include <stdio.h>
第三步,勾选Use Micr ...
CubeMX配置SPI-Flash(W25Q256)
CubeMX配置SPI-Flash(W25Q256)W25Q256(256Mb)将32M(字节byte)的容量分为512个块(block),每个块大小为64K字节,每个块又分为16个扇区(sector ...

RT-Thread配置SPI-Flash(W25Q256)
RT-Thread配置SPI-Flash(W25Q256)1.开启SPI总线新建一个空白的RT-Thread项目,本文基于STM32F103芯片。首先在drivers目录下打开board.h文件,找到 ...
范子琦第二次作业
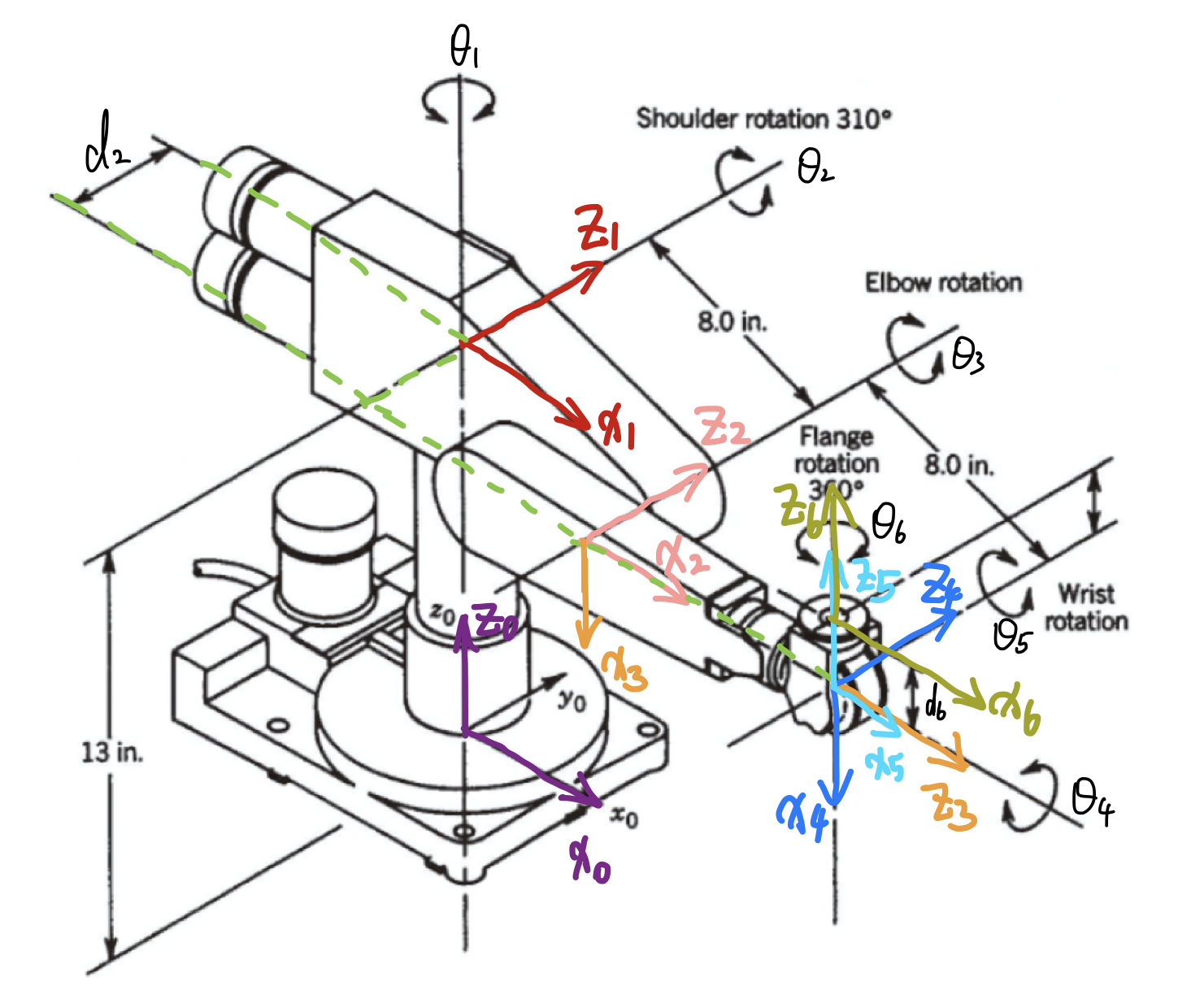
第二次作业范子琦 2019330301153 机器人工程(1)班
下文坐标系定义原则: $\left\{\begin{matrix}x_i\parallel z_{i-1}\\x_i\perp z_{ ...
Hexo部署至云服务器的宝塔面板
Hexo部署至云服务器的宝塔面板
本文为网络转载, 版权属于:Heson
原文链接:https://www.heson10.com/posts/51315.html
简介hexo 博客部署方法有好多 ...
ROS2——参数的使用
ROS2——参数的使用上回说到, Organization给每个人免费送2个汉堡, 有一天Organization正在营业中, 汉堡突然供不应求了, 领导决定临时改变规则, 之后的每个人只能领取一个汉 ...

ROS2——手把手编写一个服务
ROS2——手把手教你编写一个服务服务简介上一篇文章讲的话题通信是基于订阅/发布机制的,无论有没有订阅者,发布者都会周期发布数据,这种模式适合持续数据的收发,比如传感器数据。机器人系统中还有另外一些配 ...
ROS2——什么是接口
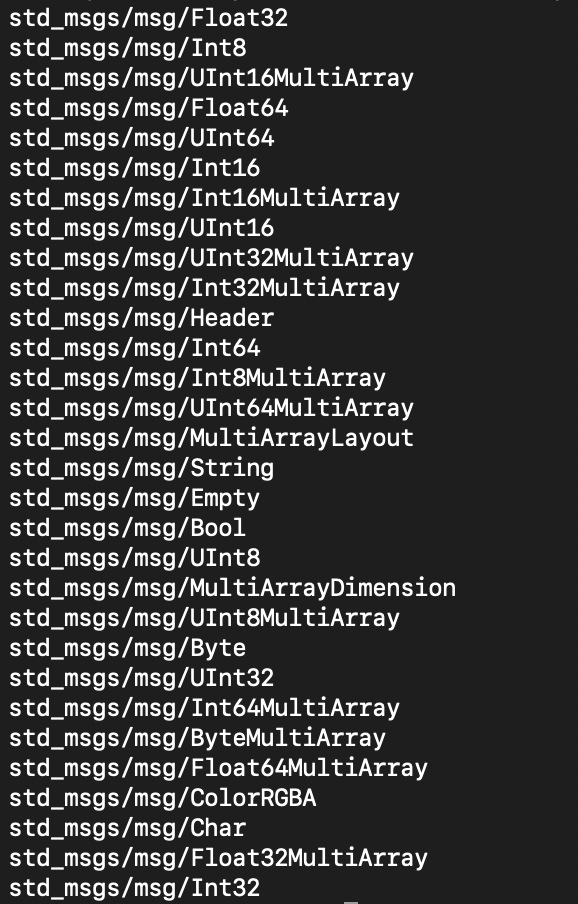
ROS2——什么是接口接口简介在机器人系统中, 往往有许许多多的硬件, 比如摄像头, 激光雷达, 每一个硬件发送的数据/数据类型是不同的, 那么ROS2是如何使用这些数据的呢?
前文KFC和Hambu ...

ROS2——手把手编写一个话题
ROS2——手把手教你编写一个话题话题简介ROS2将复杂的机器人系统拆解成许多模块节点,而这些节点之间则是通过一个至关重要的通道完成数据交换的,这个通道就是“话题”。
一个节点可以通过多个话题向外发 ...

固定Ubuntu下的端口号
固定Ubuntu下的端口号Ubuntu下ttyUSB0和ttyUSB1经常不固定,序号取决于插入顺序,先插上的序号小
固定步骤如下:
查看已插入的USB设备
1lsusb
找到对应的USB设备,记下 ...