范子琦第二次作业
第二次作业
范子琦 2019330301153 机器人工程(1)班
下文坐标系定义原则: $\left\{\begin{matrix}
x_i\parallel z_{i-1}\\
x_i\perp z_{i-1}
\end{matrix}\right.$
图注:
相同颜色为同一坐标系, 绿色虚线为延长线
有尺寸的以数字表示, 无尺寸的参照图中定义
第一题
平面三连杆机械臂的坐标系定义如下图所示:
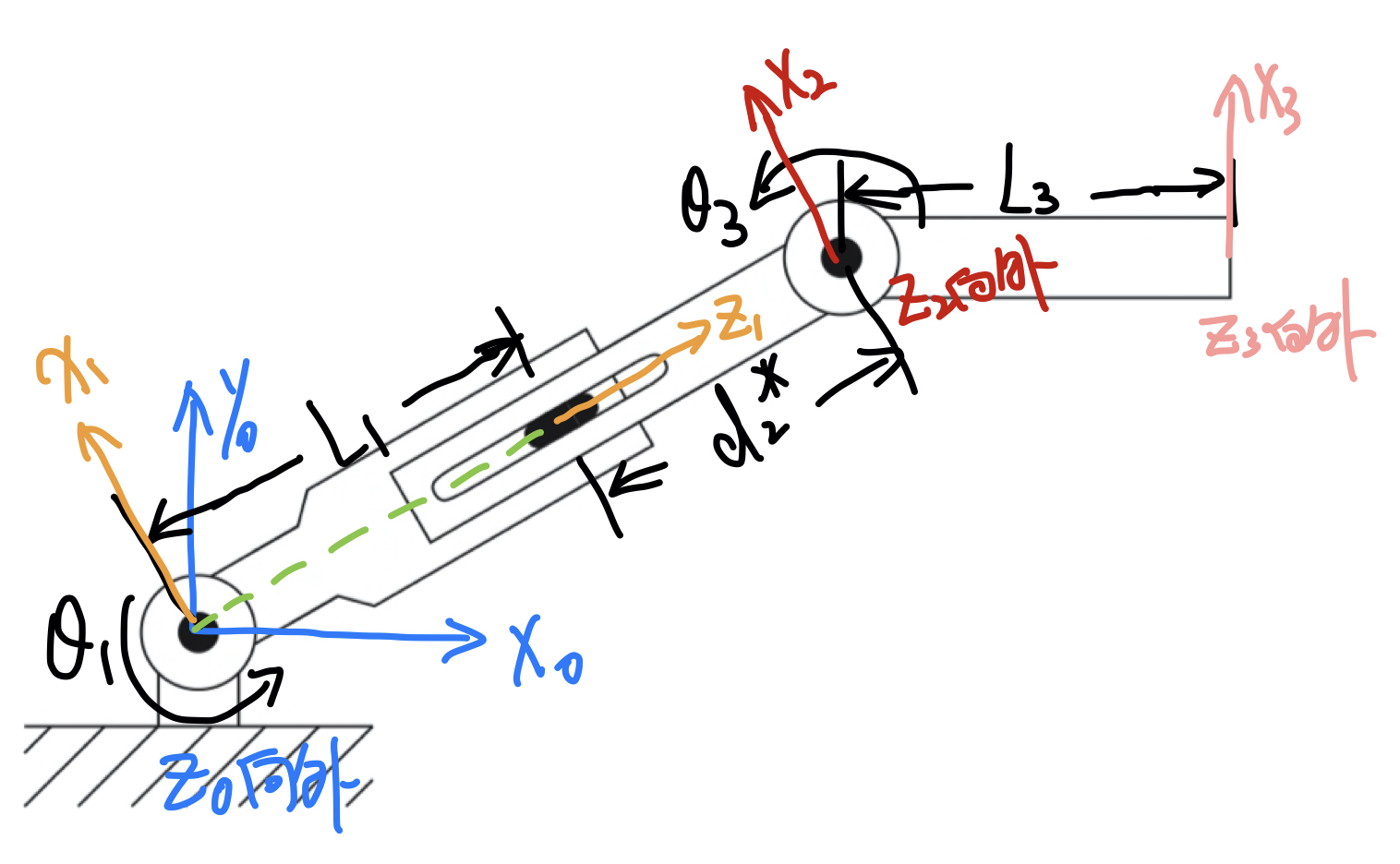
由上图坐标系配置可求得平面三连杆机械臂的DH参数:
| $i$ | $\theta_i$ | $d_i$ | $a_i$ | $\alpha_i$ |
|---|---|---|---|---|
| $1$ | ${\theta_1}^*+90$ | $0$ | $0$ | $90$ |
| $2$ | $0$ | $L_1+{d_2}^*$ | $0$ | $-90$ |
| $3$ | ${\theta_3}^*$ | $0$ | $L_3$ | $0$ |
MATLAB代码:
1 | clear;clc; |
运动学正解矩阵:
第二题
PUMA260的坐标系定义如下图所示:
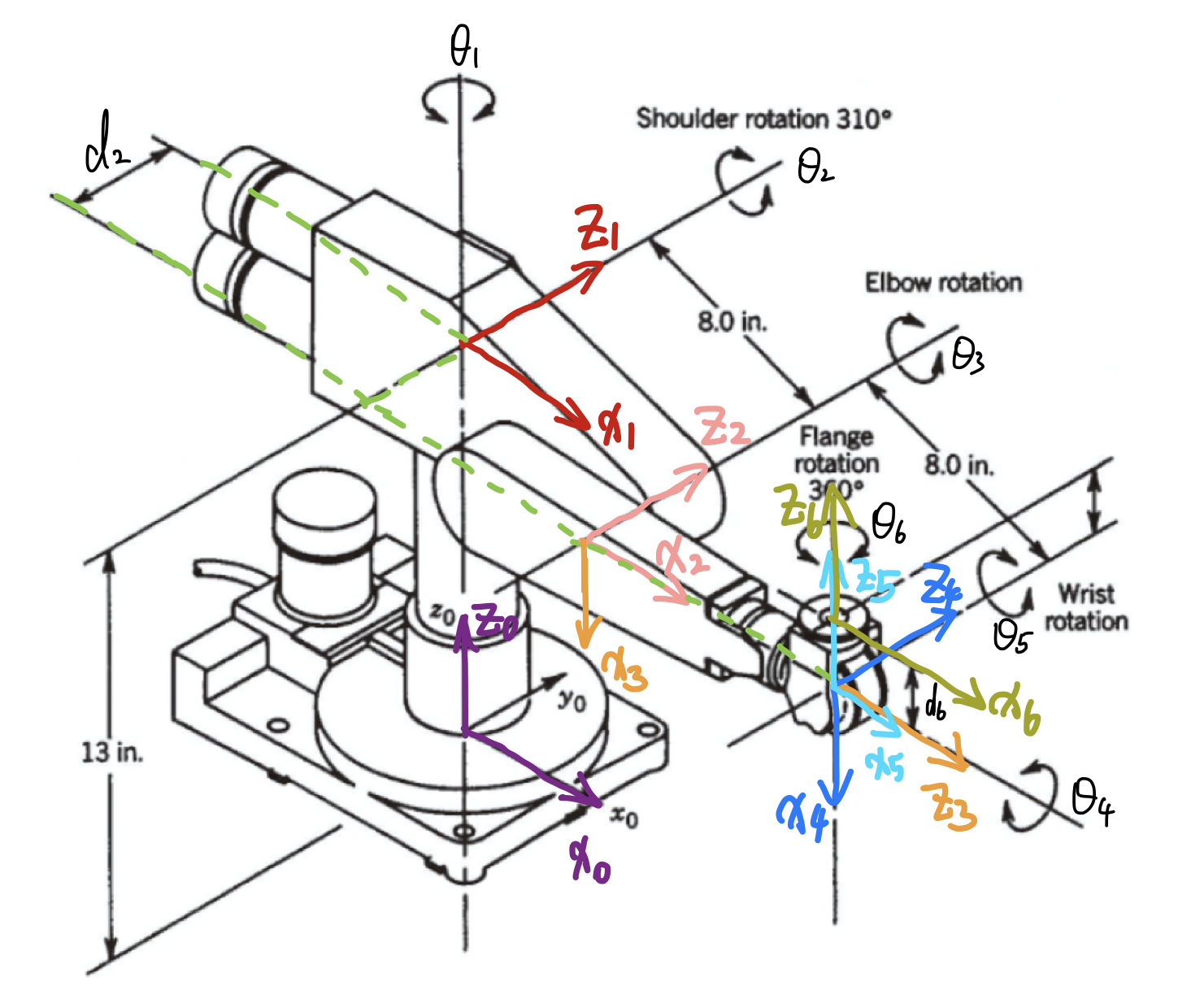
由上图坐标系配置可求得PUMA260的DH参数:
| $i$ | $\theta_i$ | $d_i$ | $a_i$ | $\alpha_i$ |
|---|---|---|---|---|
| $1$ | ${\theta_1}^*$ | $13$ | $0$ | $-90$ |
| $2$ | ${\theta_2}^*$ | $-d_2$ | $8$ | $0$ |
| $3$ | ${\theta_3}^*+90$ | $0$ | $0$ | $90$ |
| $4$ | ${\theta_4}^*$ | $8$ | $0$ | $-90$ |
| $5$ | ${\theta_5}^*-90$ | $0$ | $0$ | $90$ |
| $6$ | ${\theta_6}^*$ | $d_6$ | $0$ | $0$ |
MATLAB代码:
1 | clear;clc; |
运动学正解矩阵:
第三题
JAKA ZU3的坐标系定义如下图所示:
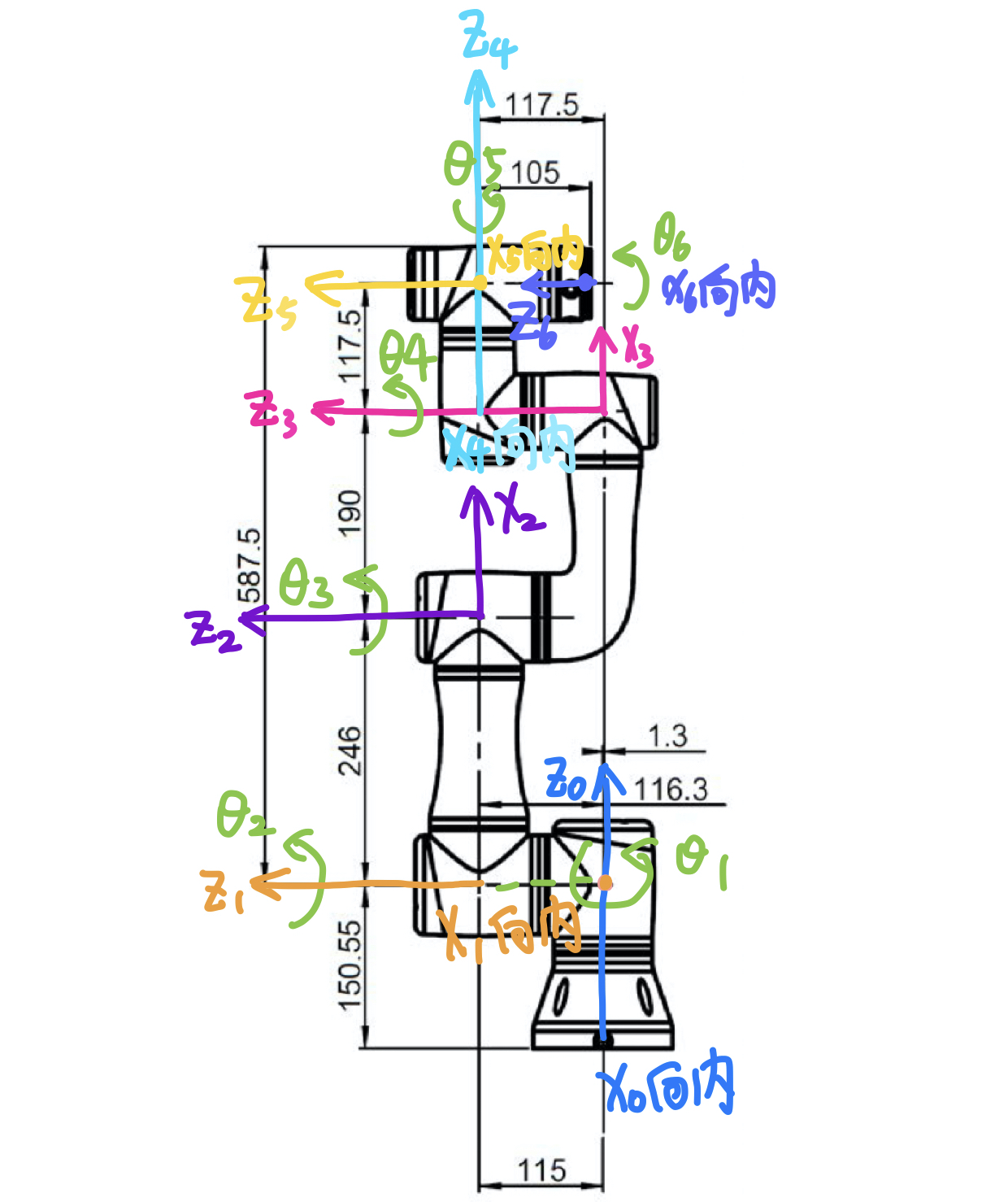
由上图坐标系配置可求得JAKA ZU3的DH参数:
| $i$ | $\theta_i$ | $d_i$ | $a_i$ | $\alpha_i$ |
|---|---|---|---|---|
| $1$ | ${\theta_1}^*$ | $150.55$ | $0$ | $-90$ |
| $2$ | ${\theta_2}^*-90$ | $115$ | $246$ | $0$ |
| $3$ | ${\theta_3}^*$ | $-116.3$ | $190$ | $0$ |
| $4$ | ${\theta_4}^*+90$ | $117.5$ | $0$ | $90$ |
| $5$ | ${\theta_5}^*$ | $117.5$ | $0$ | $-90$ |
| $6$ | ${\theta_6}^*+180$ | $-105$ | $0$ | $180$ |
MATLAB代码:
1 | clear;clc; |
运动学正解矩阵:
运动学逆解
建立仿真环境
1 | clear;clc; |
第一组数据
1 | view(3) |

第二组数据
1 | view(3) |

本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 范子琦的博客!
 微信
微信- 支付宝


评论