FOC控制原理——Clark变换和Park变换
FOC控制原理——Clark变换和Park变换
Clark变换
原理
Clark变换就是把三向坐标系变成直角坐标系
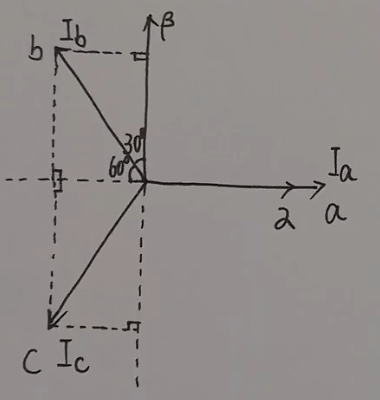
已知三向坐标系 $(I_a,I_b,I_c)$ ,这三个基向量不是正交的,所以可以将其正交化为一个直角坐标系,命名为 $\alpha-\beta$ 坐标系,变换公式为:
可以将其整理成矩阵形式:
由基尔霍夫电流定律, $I_a+I_b+I_c=0$ ,故也可整理为:
反Clark变换则将三向信号转换为两向信号,根据上式可以解得
也可通过计算Clark变换常数矩阵的伪逆来确定反Clark变换的常数矩阵(使用MATLAB中的 pinv()函数)
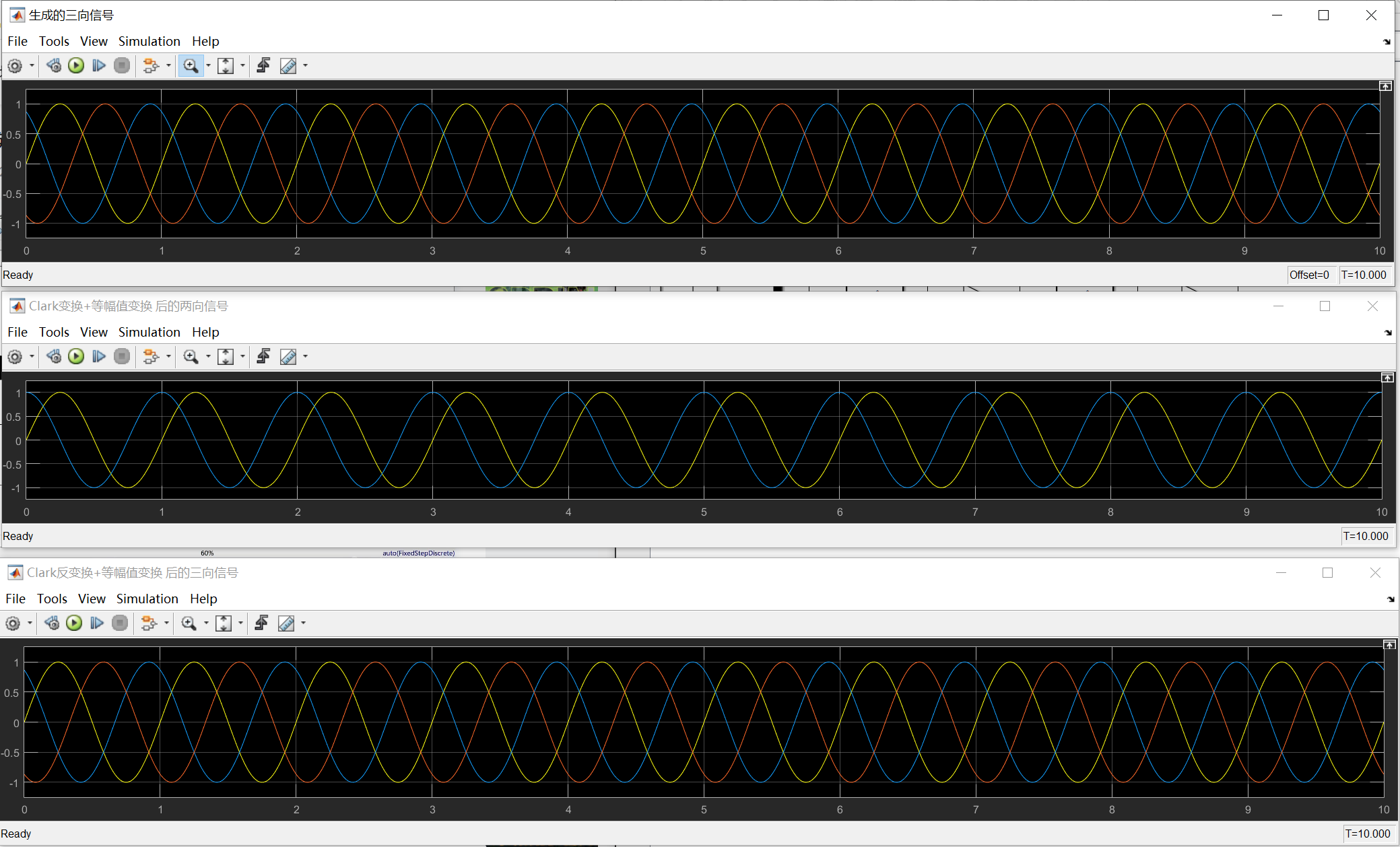
Simulink仿真
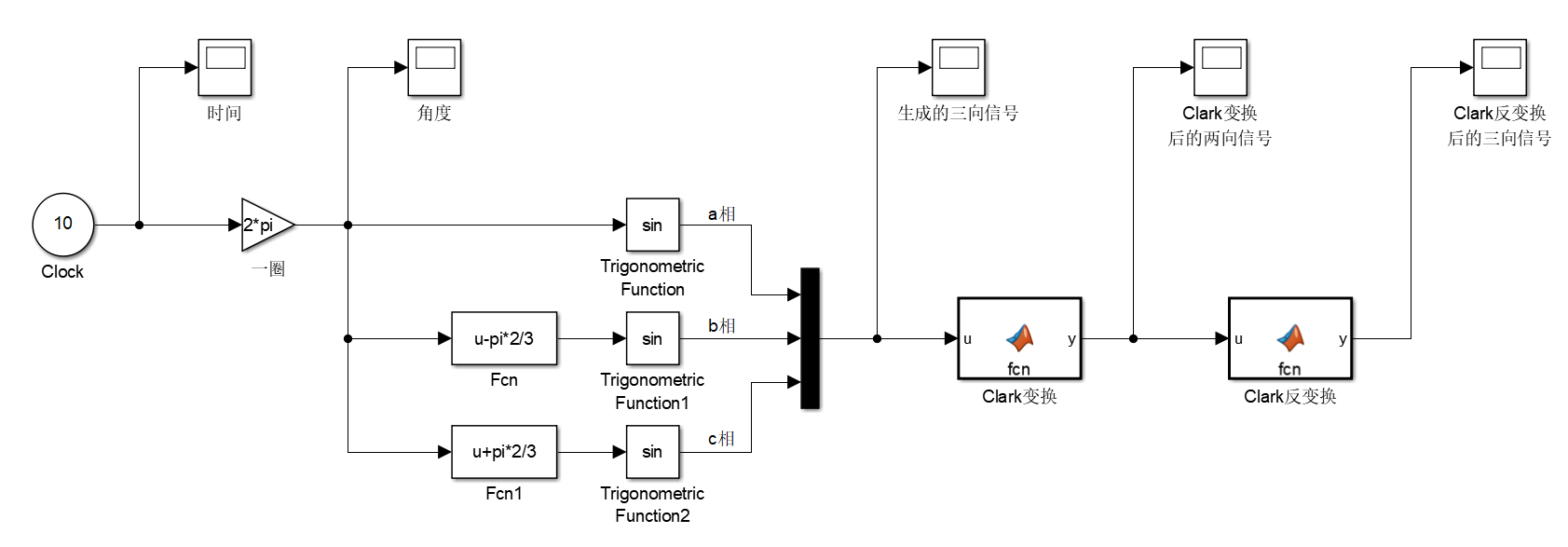
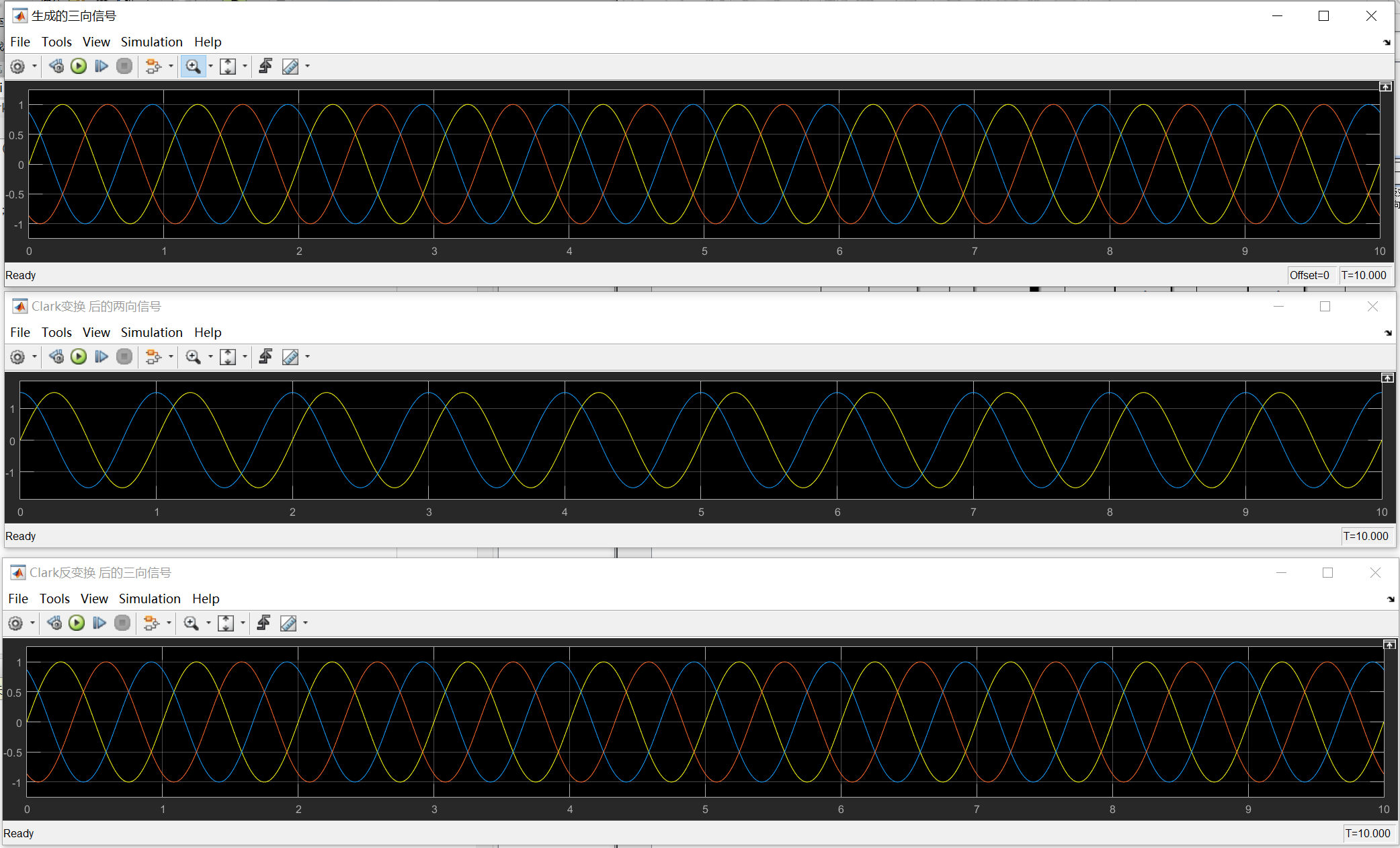
通过图像可以看到,输入信号的幅值为1,经过Clark变换后的图像幅值变为1.5,即变为 $\frac{3}{2}$ 倍;进行反Clark变换后幅值又变为1.5,即变为 $\frac{2}{3}$ 倍。所以要进行等幅值变换。修改仿真:
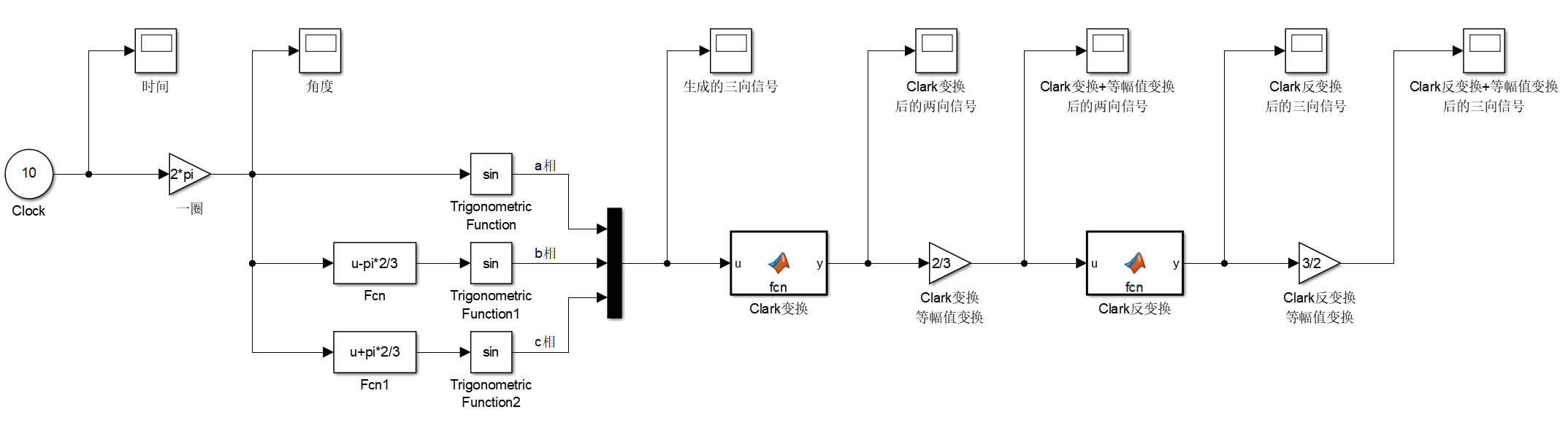
可以看到,经过等幅值变换后,幅值统一为1。
Park变换
原理
Park变换可以将正弦变量线性化
将 $\alpha-\beta$ 坐标系旋转 $\theta$ 度变为 $d-q$ 坐标系, $d$ 指向转子中心, $q$ 指向切线方向,其中 $\theta$ 是转子当前的角度。如下图
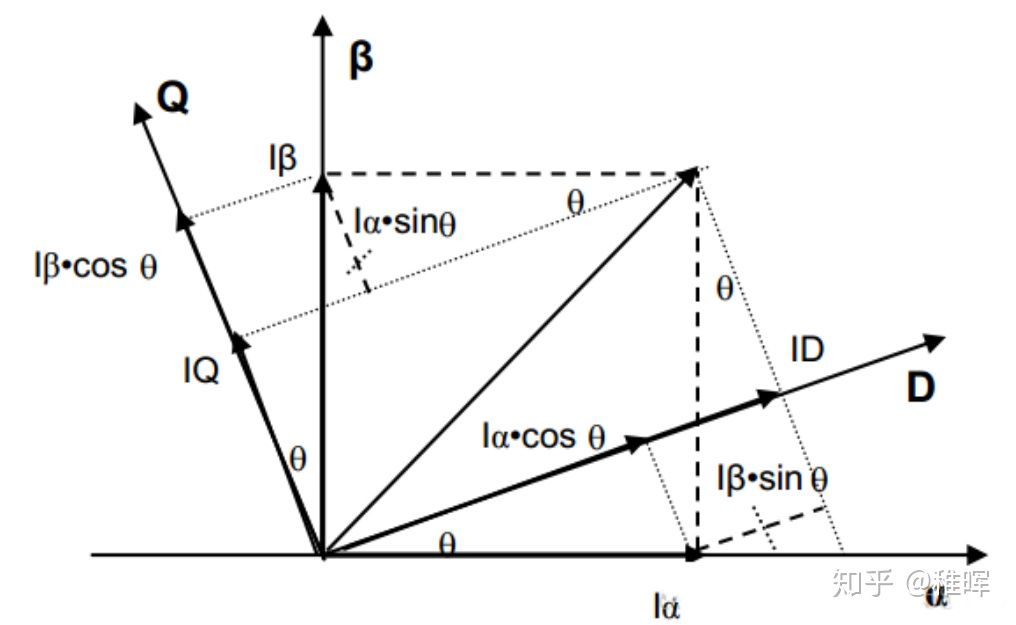
也就是说 $d-q$ 坐标系始终跟着转子旋转。
则可以写出
整理成矩阵形式
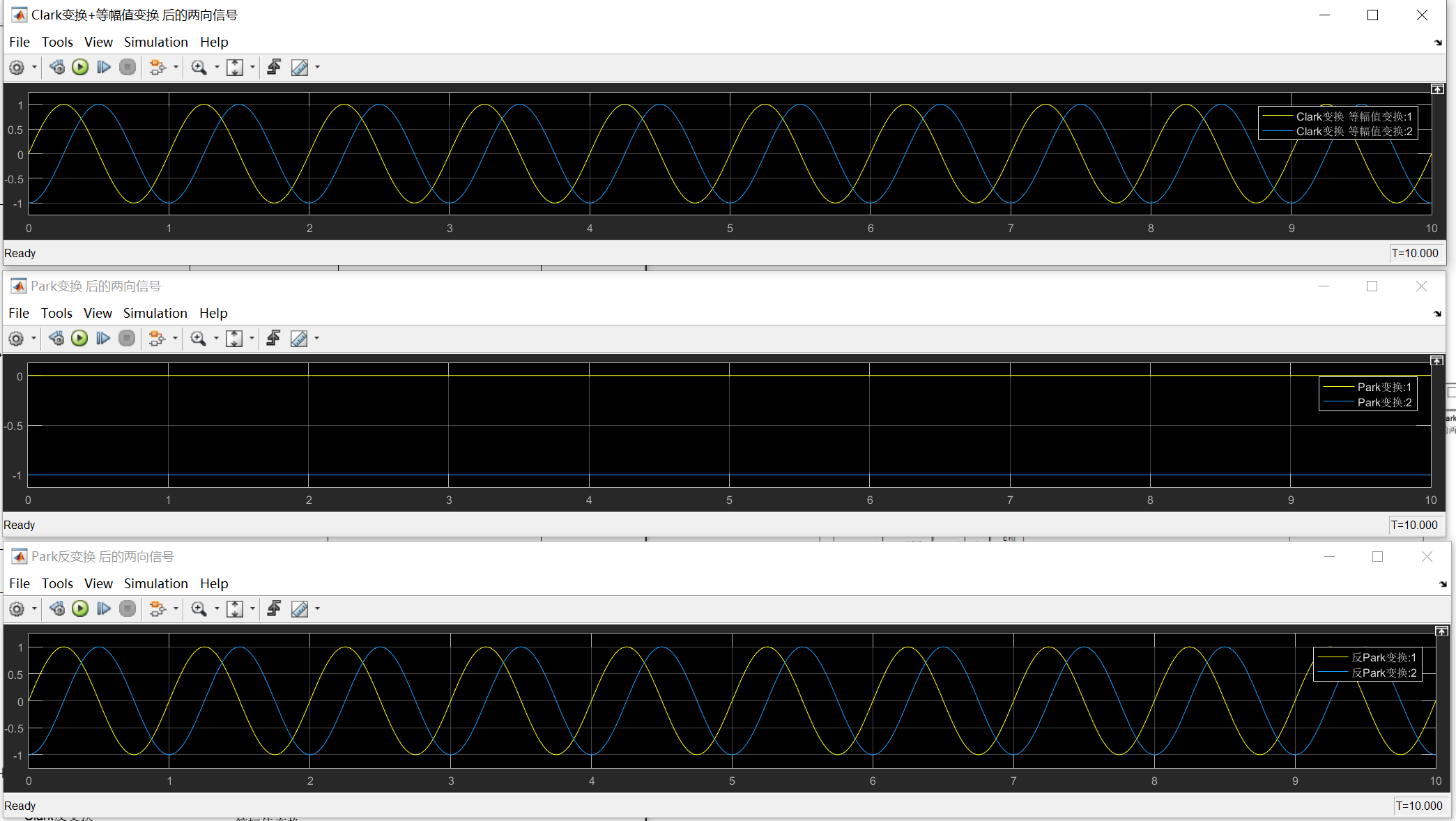
所以如果 $d$ 轴为0,则功率全部输出在 $q$ 轴上。
同理,可以求得反Park变换
Simulink仿真
在Clark变换和等幅值变换的基础上添加Park变换
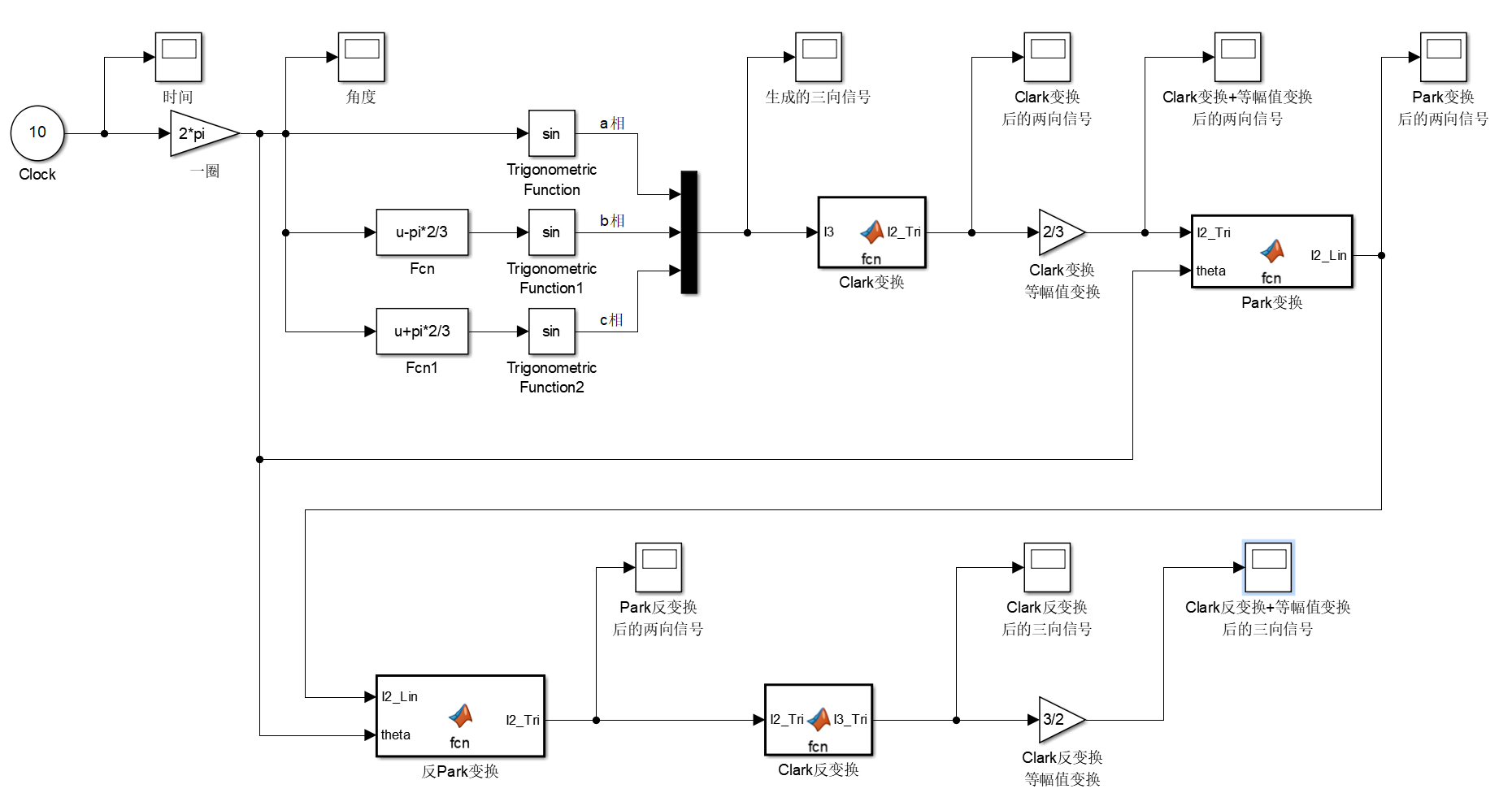
关注Park部分
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 范子琦的博客!
 微信
微信- 支付宝




评论